Beschreibung


Hochleistungsfähiges autonomes KI-Rennauto
leistungsstärkeres Chassis, schnellere Renngeschwindigkeit
interaktive Webseitenprogrammierung, hohe Bildwiederholrate durch torch2trt (PyTorch to TensorRT translator) Optimierung, einfaches Erreichen von schnellerem autonomen Selbstfahren
geeignet für den KI-Unterricht in der Schule/professionelle Rennen
DonkeyCar open source project
tiefgründig lernendes selbstfahrendes Auto
JetRacer Pro unterstützt auch das Open-Source-Projekt DonkeyCar. DonkeyCar nutzt das Deep-Learning-Framework Keras/TensorFlow für neuronale Netzwerke zusammen mit der Bildverarbeitungsbibliothek OpenCV, um das selbständige Fahren zu ermöglichen.

Tiefes Lernen, autonomes Fahren

Einführung
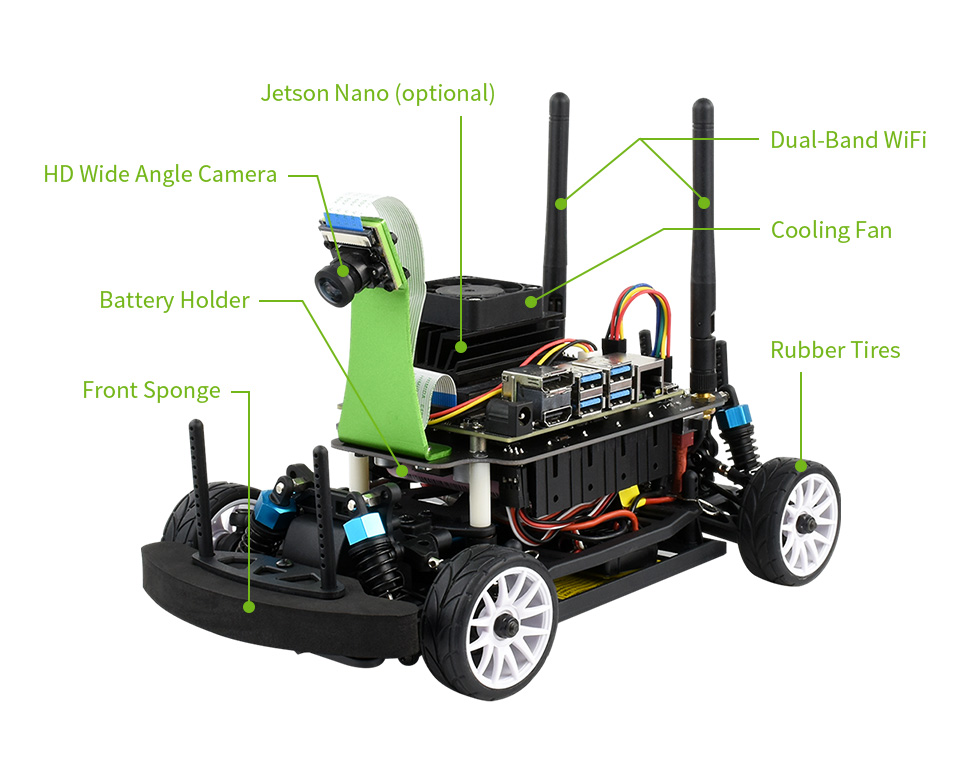
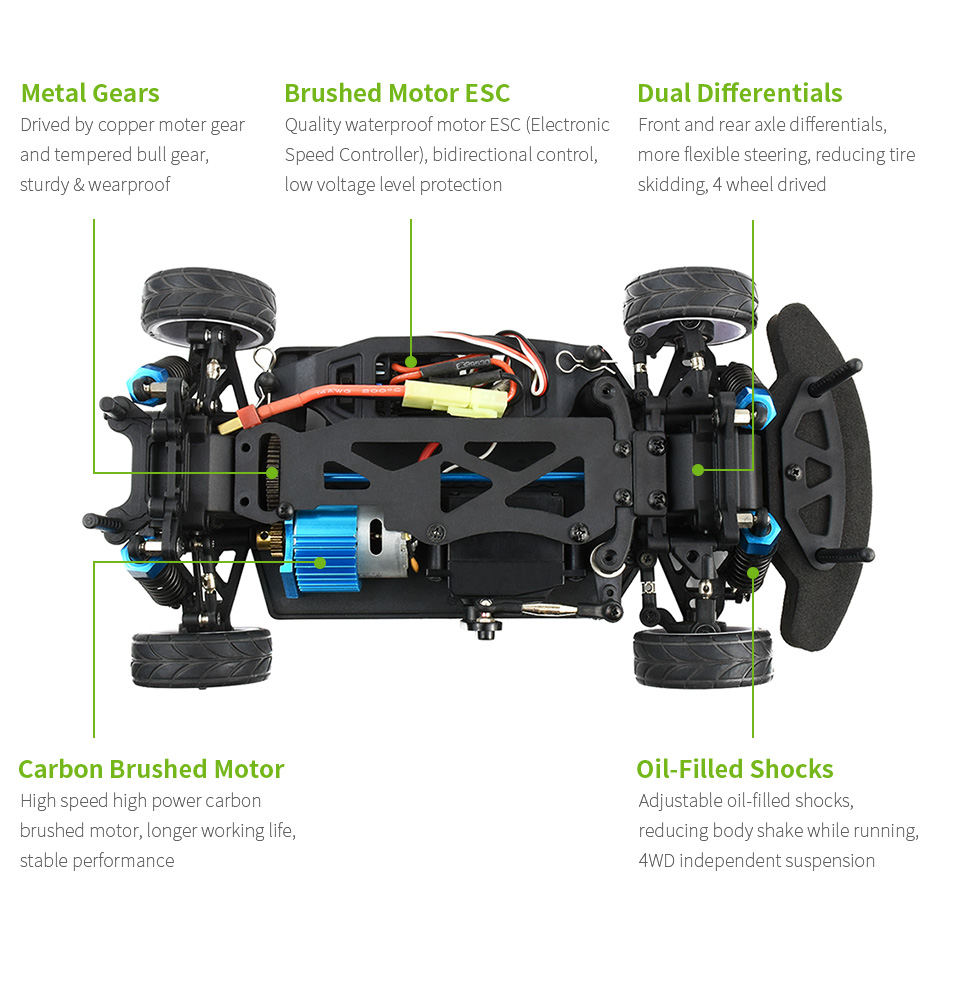
Chassisstruktur
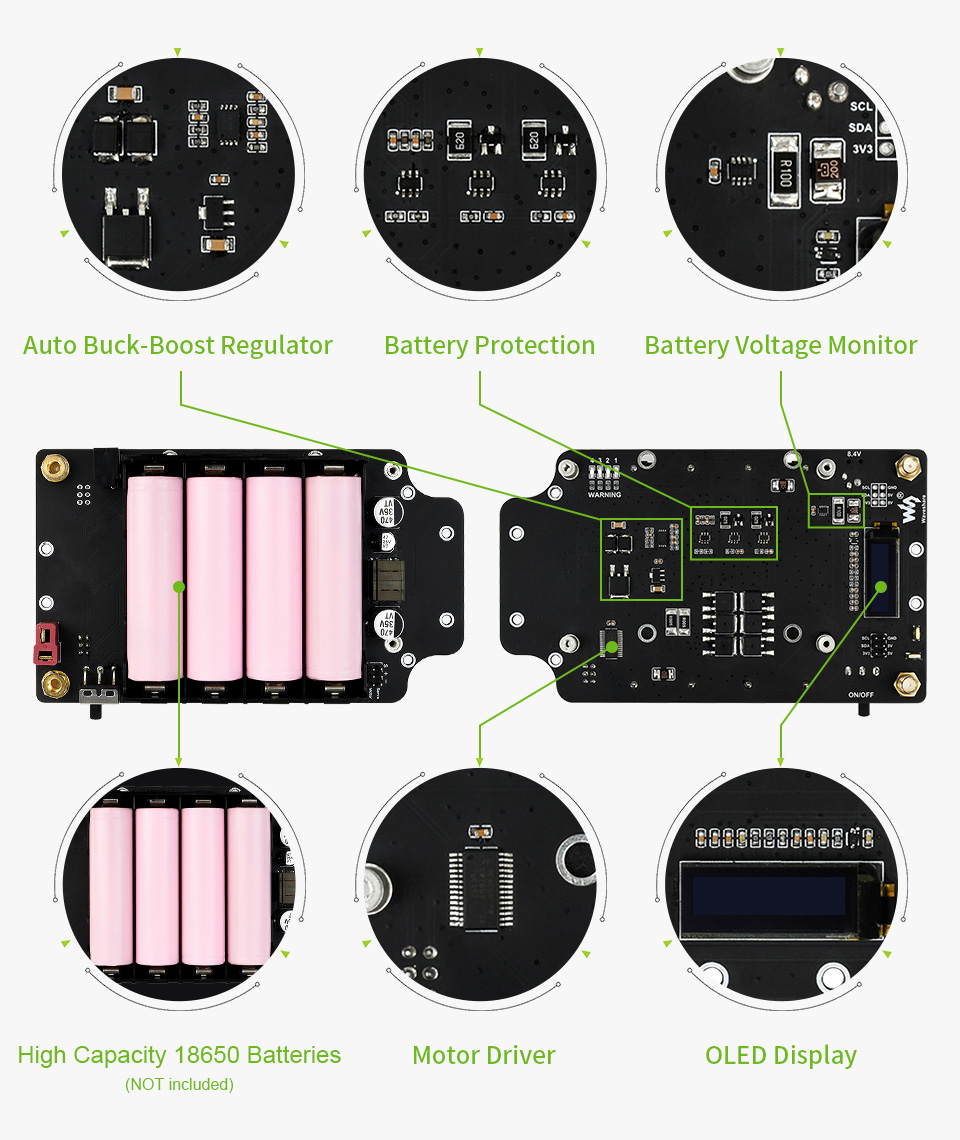
JetRacer Pro Erweiterungsplatine hoch integriert
wiederaufladbar, Akkuspannungsüberwachung, keine umständliche Verkabelung, einfache Montage
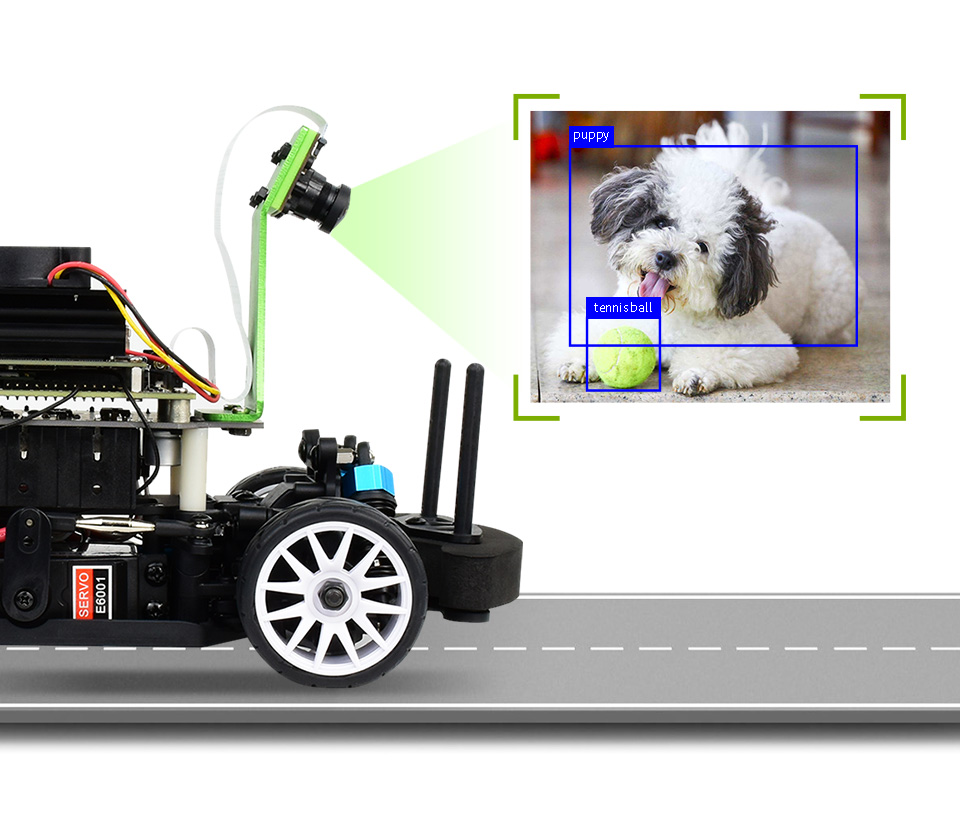
8MP 160° FOV Kamera
Sony IMX219 Hochqualitätssensor, 3280×2464 Auflösung
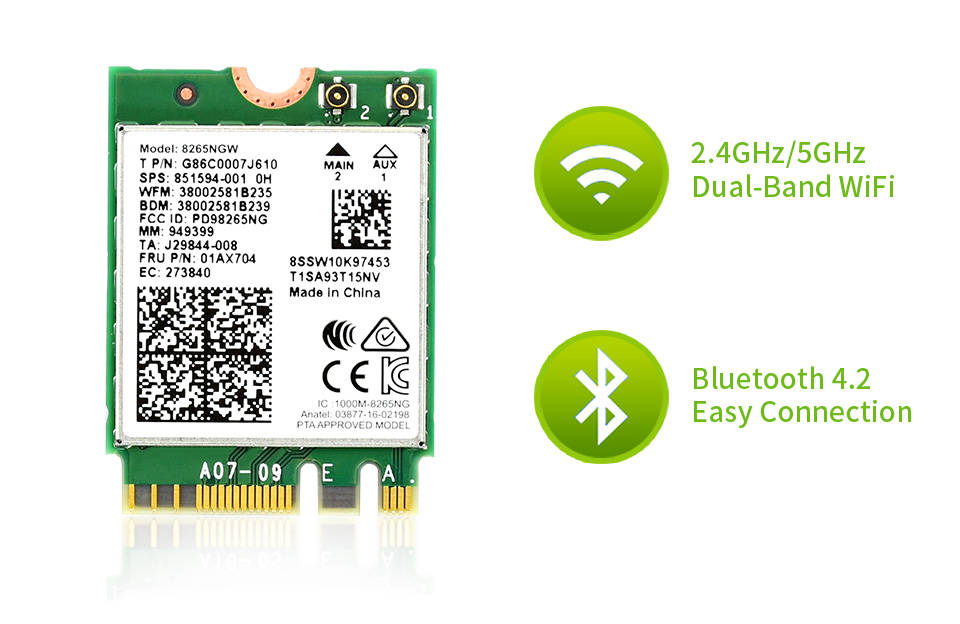
Dual-band Wireless AC8265
Hochgeschwindigkeits-WiFi, stabile Bluetooth-Kommunikation, geringe Latenz
Mehrfache Teleoperationsmethode

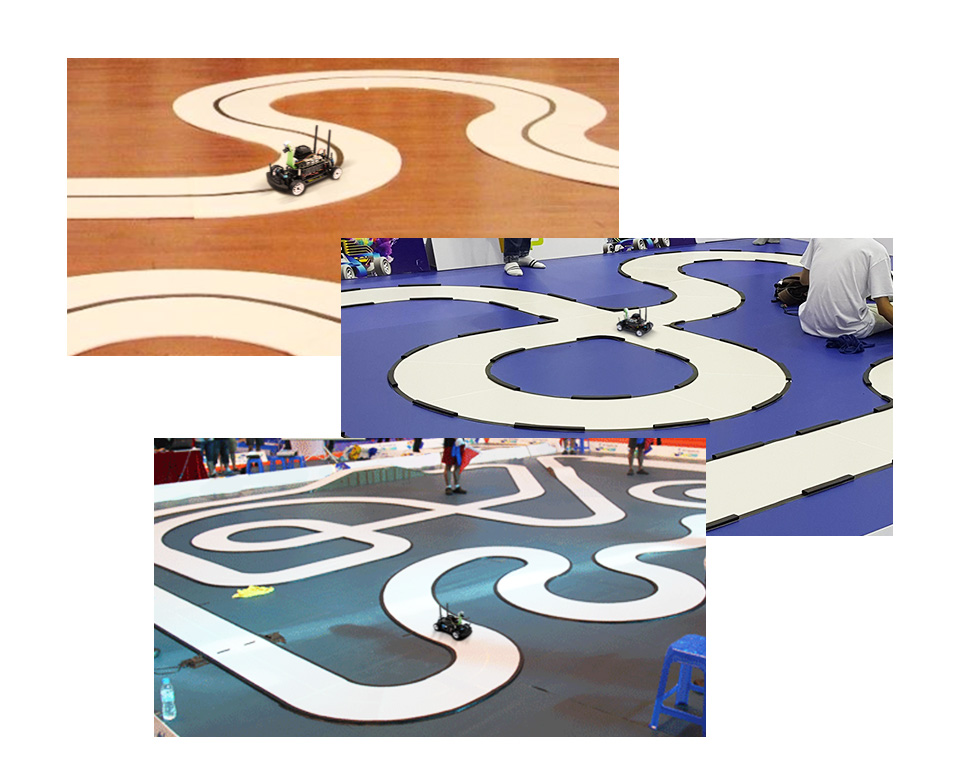
Extra kostenlose Streckenkarte
Lieferung mit 3m×2m großer Streckenkarte für Ihren Komfort


Jetson AI Robot Selection Guide
 JetBot 2GB JetBot 2GB |
 JetBot JetBot |
 JetRacer JetRacer |
 JetRacer Pro JetRacer Pro |
||
| Controller | Jetson Nano 2GB | Jetson Nano | |||
|---|---|---|---|---|---|
| OS | Ubuntu 18.04 LTS | ||||
| Sprache | Python | ||||
| Kamera | 8MP HD Auflösung, 160° FOV Weitwinkelkamera | ||||
| OLED | 0.91" 128×32 Pixel | ||||
| Wireless | 2.4GHz / 5.8GHz Dual-Band WiFi | 2.4GHz / 5GHz Dual-Band WiFi, Bluetooth 4.2 | |||
| Telebetrieb | Gamepad, Webseite | ||||
| Kommunikation | WiFi | ||||
| Schutz | Überladungs-/Entladungsschutz, Überstromschutz, Kurzschlussschutz, Verpolungsschutz | ||||
| Antriebsart | Differential 2WD | Achsschenkellenkung Doppelgetriebemotor Hinterradantrieb | Achsschenkellenkung Hochgeschwindigkeitsmotoren 4WD Vorder- und Hinterachsdifferentiale | ||
| Stoßdämpfer | N/A | Einstellbare ölgefüllte Stoßdämpfer 4WD-Einzelradaufhängung | |||
| Stromversorgung | 12.6V, 18650 Akku × 3 (in Serie geschaltet) | 8.4V, 18650 Akku × 4 (zwei parallel, zwei in Serie) | |||
| Hinweis: die 18650 Akkus sind NICHT enthalten. | |||||
| Motor | TT-Motor Untersetzungsverhältnis 1:48 Leerlaufgeschwindigkeit 240RPM | 37-520 DC-Getriebemotor Untersetzungsverhältnis 1:10 Leerlaufdrehzahl 740RPM | RC380 Hochgeschwindigkeits-Karbonbürstenmotor Leerlaufdrehzahl 15000RPM | ||
| Servo | N/A | MG996R, 9kg/cm Drehmoment | E6001, 6kg/cm Drehmoment | ||
| Gehäuse | Gehäuse aus Aluminiumlegierung | Gehäuse aus hochwertigem, robustem Kunststoff | |||
| Ausfallsicher | N/A | Frontschwamm | |||
| Programmbibliothek | JetBot, ROS | JetRacer, DonkeyCar | |||
| Vorschlag | Einstiegsstufe Grundlegende Programmierkenntnisse erforderlich | Wettkampfstufe Erfahrene Programmierkenntnisse erforderlich | Hochgeschwindigkeits-Wettkampfstufe Erfahrene Programmierkenntnisse erforderlich | ||
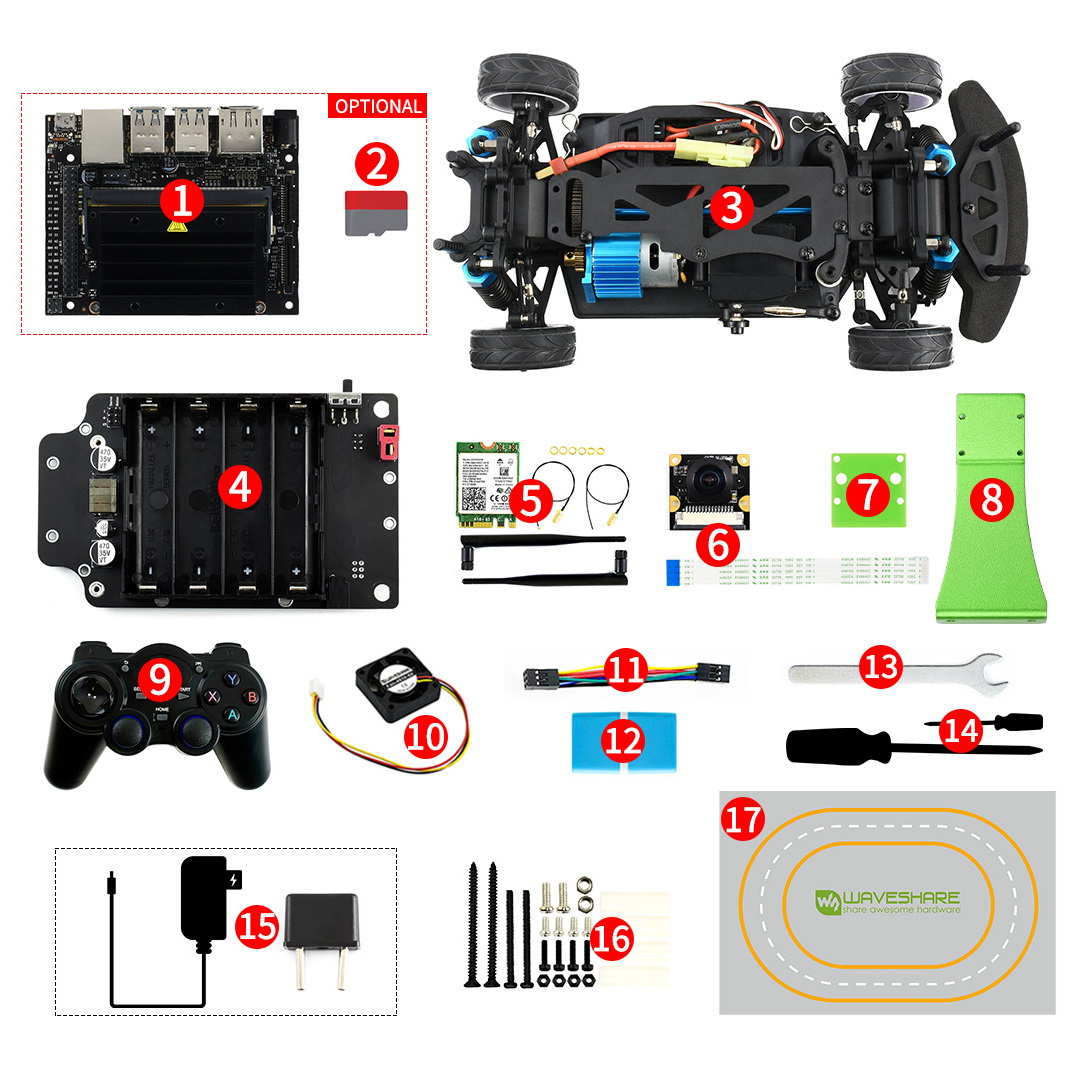
Packungsinhalt
- Die 18650er Akkus sind NICHT im Lieferumfang enthalten
- Bitte beachten Sie, dass die Akkulänge weniger als 67mm betragen MUSS, einige Akkus mit Schutzplatte auf dem Markt werden NICHT unterstützt, mehr erfahren
- OPTIONEN Jetson Nano Developer Kit (B01)
- OPTIONEN Micro SD Card 64GB
- On-Road Chassis
- JetRacer Pro Erweiterungsboard
- Wireless-AC8265 mit Antennen
- IMX219-160 Kamera
- Abstandshalter für die Kamera aus Acrylglas
- Kamerahalterung
- Wireless Gamepad
- Kühlungslüfter
- 6Pin Kabel
- Micro SD Kartenleser
- Schraubenschlüssel x2
- 8.4V Ladegerät + EU Kopf
- Schraubenpaket
- Streckenkarte